



工業機器人中的各類傳感器技術應用
2019-10-24 來(lái)源:轉載 作者:-
2012年,美國提出“工(gōng)業互聯網”,2013年(nián),德(dé)國提出“工業4.0”,2015年,中國提出“中國製(zhì)造2025”。在工(gōng)業物聯網(wǎng)、AR、雲計(jì)算等技術熱潮下,全球眾多優秀製造企(qǐ)業都開始建設智慧工廠,實現自動化、信息化和智能化的智慧工廠是未來工業製造的(de)發展趨(qū)勢。那(nà)麽,什麽樣的(de)工(gōng)廠(chǎng)才能稱做智慧工(gōng)廠(chǎng)?作為智慧工廠重要組成部(bù)分的工業(yè)機器人采用了哪些技術?
智(zhì)慧工廠的標配
提到智(zhì)慧工廠,人們首(shǒu)先想到的是(shì)自(zì)動化、智能化、工業機器人、工業物聯網等概念,那麽,一個智慧工廠的標準配置有哪些(xiē)?
控製器是智慧(huì)工廠的大腦,由(yóu)程序計數器、指令寄存器、指令譯(yì)碼器(qì)、時序產生器和(hé)操作控製器組成,它是發布命令的“決策機構”,完成協調和指揮整個(gè)計算機係統(tǒng)的操作。智慧工廠中常用的控製器有PLC、工控機等。
工業機器人是自動執行工作的機器裝置,它既可以接(jiē)受人的指揮,又可以運行預先編排(pái)的程序,也可以根據以人工智能技術製定(dìng)的指令行動。
伺服電機是指(zhǐ)在伺服係統中控製機(jī)械元(yuán)件運轉的發動機,是(shì)自動化工廠提供動力的肌肉。伺服電機轉子轉速受輸入信號控製,在自動(dòng)控製係統中用作執行元件,可把所收到的電信號轉換成電動機(jī)軸上的角位移或角速度輸出。
傳(chuán)感器為智慧工廠提供(gòng)觸覺,是實現自(zì)動檢測和自動控製的首要環節。它能感受到被測量的信息(xī),並能將感受到的信息(xī)按一定規(guī)律變換成電信號或其他形(xíng)式的(de)信息輸出。在自動化生產(chǎn)過程中需要用各種傳感器來監視和控製各個(gè)參數,使設備工作在正常狀(zhuàng)態或最佳狀態,並使產品達到(dào)最好的質量。
變頻器(qì)是智慧工廠的交換器,由(yóu)整流(liú)(交流變直流)、濾波(bō)、逆變(直流變交流)、製動單元、驅動單元和檢測單元(yuán)微處理單元組成。它應用變頻技術與微電子(zǐ)技術,通過改變電機工作(zuò)電源頻率的方式來控製交(jiāo)流電動機。
電磁閥是用電磁控製的工業設(shè)備,可以配合不同的電路來實現預期的控製(zhì)。它屬於執行器,是智慧工廠的開(kāi)關。
工業相機是智慧工廠的眼睛,是機器視覺係統關鍵組件。工業相機一般(bān)安裝在機(jī)器流水線上代替人眼來(lái)做測量和(hé)判斷,通過數字圖像攝取目標轉換成圖像信號,傳送給專用的圖(tú)像處理係統。圖像係統對這些信號進行各種運算,抽取目標特征,並根據判別的結果來控製現場的設備動作。
儀器儀(yí)表是智慧工廠的調節係統,用(yòng)來檢出、測量、觀察並(bìng)計算各種物理量、物質成分和參數等。比如測量壓力、液位、流量、溫度等一些控(kòng)製過程(chéng)所需要的參數值,就需要相關的儀器儀表。
自動化軟件是智慧工廠的心髒。例如,SCADA數據采集(jí)與監控係統可以在無人看管(guǎn)的情況下,對生產過程進行調(diào)度和自(zì)動化控製。控製櫃是智慧工廠的中(zhōng)樞係統。智慧(huì)工廠涉及電(diàn)氣、變頻、電源、水泵等控製櫃,可實現不同的控(kòng)製功能(néng)。
下麵將詳細剖析智慧工廠的重(chóng)要組件——工業機器人。
工業機(jī)器人涉及哪些技(jì)術?
機器人自動化是一項快速進步的技(jì)術,在短短幾十年的(de)時間裏(lǐ),工業機器人已經在全(quán)世界範圍內變成工廠裏普通的裝置。工業機器人(rén)不僅可以克服惡劣環境對生產的(de)影響,減少人工的使用,保(bǎo)障工人的安全,還能夠幫助工廠節約生產成本,提高生產效率,從而保證產品質(zhì)量。
工業機器人是多自由度的機器裝置(zhì),能(néng)自動執行工作,按照(zhào)自身動力和控製能力來實現各種功能,由機(jī)械部分、傳感部分、控製部(bù)分(fèn)等(děng)三大部分組成,這(zhè)三大部分又分成(chéng)六個子係統。分別(bié)為:
(1)驅(qū)動係統:給每個關節即每個運(yùn)動自由度安置傳(chuán)動裝(zhuāng)置,使機器人運動起(qǐ)來。
(2)機械結構係統(tǒng):由機身、手臂、末端操作器三大件(jiàn)組成。每一(yī)大件都有若幹(gàn)自由度,構(gòu)成(chéng)一個多自由度的(de)機械係統。手臂一般由上臂、下臂(bì)和手腕組成。末端(duān)操作器是(shì)直接裝在(zài)手腕上的一(yī)個重要部件,可以是兩手(shǒu)指或多手指的手爪,也可以是(shì)噴漆槍、焊(hàn)槍等。
(3)傳感係統:獲取內部和外(wài)部環境狀態中(zhōng)有意義的(de)信息,提高(gāo)了機器人的機動性、適應性和(hé)智能化水準。
(4)機器(qì)人-環境交互(hù)係統:實現機器人與外部環境中的設備相互聯係和協調的係(xì)統。
(5)人機交(jiāo)互係(xì)統:人與機器人進行聯係和參與機器人控製的裝置。
(6)控製係統:根據機器(qì)人的作業指令程序以(yǐ)及從(cóng)傳感器反饋回來的信號,支(zhī)配機器人的執行機構去完成規定的運動和功能。
工業機器人中常用到的傳感器
在工業自動化領域,機器人需要(yào)傳感器提供必要的(de)信息,以正確執行相關(guān)的操作。一份報(bào)告預測,到2021年,全球工業(yè)機器人傳感器市場將以約8%的複合年增長率(CAGR)穩步增長。對於(yú)包括(kuò)消(xiāo)費者(zhě)和汽車在內的機器人傳感應用,另一(yī)份報告(gào)明確指出,到2027年,視覺係統將單獨成就57億美元的市場,力傳感(gǎn)器市(shì)場將(jiāng)超過69億美元。
下(xià)麵列(liè)出了工業機器人中最常用到的傳感器。
二維視覺傳感器
二維(wéi)視覺是一個可以執行從檢測運動物體(tǐ)到傳輸帶上的零件定位等多種(zhǒng)任務的(de)攝像頭。許多智能相機(jī)都可以檢測零件並協助機(jī)器人確定零件(jiàn)的位置,機器(qì)人可以根據(jù)接收到的信息適(shì)當調整其動作。
三維(wéi)視覺(jiào)傳感器
三維視覺係統必須擁有兩(liǎng)個不同角度的(de)攝像機或激光掃(sǎo)描器,用以檢測對象的第(dì)三維度(dù)。例如,零件取放便是利用三維視覺(jiào)技(jì)術檢測物體並創(chuàng)建三維圖像,分析並選擇最(zuì)好的拾取方式。
力/力矩傳感器
如果說視覺(jiào)傳感器給了機器(qì)人眼睛,那麽力(lì)/力矩傳感器則給機器人(rén)帶去了觸覺。機器人利用力/力矩傳感器感知末端執行器的力度。多數情況下,力/力矩傳感器位(wèi)於機器人和夾具(jù)之間,這(zhè)樣,所有反饋到夾具上的力都(dōu)在機器人的監控之中。有了力/力矩傳感器(qì),裝配、人(rén)工引導、示教、力度限製等應用才(cái)得以實現。
碰撞檢測傳感器(qì)
這種傳感器(qì)有各種(zhǒng)不同的形式(shì),其主(zhǔ)要應用是為(wéi)作業人(rén)員提供(gòng)一(yī)個安全的(de)工作環境,協作機(jī)器人最需要(yào)它們。一些傳感器可以是某種觸覺識別係統,通過柔軟的表麵感知壓力,給機器人發送信號,限製或停止機器(qì)人的運動。
一些傳感器還可以直接內置在機器人中。有些公司利用加速度計(jì)反饋,還有些則使用電流反饋。在這兩種情況(kuàng)下,當機器人感知(zhī)到異常的力度時,便觸(chù)發緊急停止(zhǐ),從而確保安全。
要想讓工業機器人與人進行協作,首先要找出(chū)可以保證作業人員安全(quán)的方法。這些傳感器有各種形(xíng)式,從攝(shè)像頭到激光等,目的是告訴機器人周圍的狀況。有些安全係(xì)統(tǒng)可以設置成當有人出現在特定的區域/空間時,機器人會(huì)自動減速運行,如(rú)果人員(yuán)繼續(xù)靠近,機器人則會停(tíng)止工作。最簡單的例子是電梯門上的激光安(ān)全傳(chuán)感(gǎn)器。當激光檢測到障礙物時(shí),電梯門會立即停止並退回(huí),以(yǐ)避免碰撞。
其它傳感器
市場(chǎng)上還(hái)有很(hěn)多的(de)傳感器適用於不同的應(yīng)用。例如焊縫追蹤傳感(gǎn)器等。
觸覺傳(chuán)感器也越來越受歡(huān)迎。這類傳感器一(yī)般(bān)安裝在抓手上,用(yòng)來檢測和感覺抓取的物體(tǐ)是什麽。傳感器通(tōng)常能夠檢測力度並得出力度分布的情況,從而知道對象的(de)確切(qiē)位置,讓你可以控製抓取的位置和末端執行器的抓取力度。另外還有一(yī)些觸覺傳感器可以檢測(cè)熱量的變化。
視覺和接近傳感器類似於自動駕駛車輛所需(xū)的傳(chuán)感器,包括攝像頭、紅外線(xiàn)、聲納、超聲(shēng)波、雷達和激光雷達(dá)。某些情況下可以使用多個攝像頭,尤其是立體視覺。將這些傳感器組合起來(lái)使用,機器人便可以確(què)定尺寸,識別物體,並確(què)定其距離。
射(shè)頻識別(bié)(RFID)傳感可以提供識(shí)別(bié)碼並允許得到許可的機器人獲取其他信息。
麥克風(聲學傳感器)幫(bāng)助工業機器人接收語音命令並識別熟悉(xī)環境中的異常聲音。如果加上壓電傳感器,還可以識別並消除振動引起的噪聲,避免機器人錯誤理解語音命令。先進的(de)算法甚至可以讓機器人了解說話者的情緒。
溫度傳感是機器人自我診斷(duàn)的一部分,可用(yòng)於確(què)定其周遭的環境,避免(miǎn)潛在的有(yǒu)害熱源。利用(yòng)化學、光學和顏色傳感器,機(jī)器人能夠評估、調整和(hé)檢(jiǎn)測其環境中存在的問題(tí)。
對於可以走路、跑步甚至跳舞的人形機器(qì)人,穩定性是一個主要(yào)問題。它們需要與智能手機(jī)相同類型的傳感器(qì),以便(biàn)提供機器人的準確位置數(shù)據。在(zài)這些(xiē)應用采用了具有3軸加速度計、3軸陀螺儀(yí)和3軸磁力計的9自由度(9DOF)傳感器或慣性測量單元(IMU)。
傳感(gǎn)器是實現軟(ruǎn)件智能的關鍵組(zǔ)件,沒有傳(chuán)感器,很多複雜的操作就不能實(shí)現。它們不僅實現了複(fù)雜的操作,同時也保證這些操作在進行的過程中得到良好的控製。
工業機器(qì)人避障(zhàng)主要(yào)用到哪些傳感器?
移動機器人需要通過傳感器實時獲取周(zhōu)圍(wéi)的障礙物信息,包括尺寸、形狀和位置信(xìn)息,來實現避障。避障(zhàng)使用的傳感器有很多種,目(mù)前常見的有視覺(jiào)傳感器、激光傳感器、紅外傳感器(qì)、超聲波傳感器等。
超聲波傳感器
超聲波(bō)傳感器的基本(běn)原理是測量超聲波的飛(fēi)行時間,通過d=vt/2測量距離,其(qí)中(zhōng)d是距離,v是(shì)聲速,t是飛行時間。
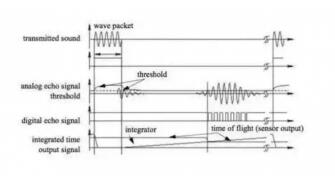
上(shàng)圖是超聲波傳感器信號的一個示意。通過壓電或靜電變送器產生一(yī)個頻率在幾十kHz的超聲(shēng)波脈衝組成波包(bāo),係統檢測高於某閾值的反向聲(shēng)波,然後(hòu)使用測(cè)量到的飛行(háng)時間計算距(jù)離。超聲(shēng)波傳(chuán)感器一般作用距離較短,普通的有效探測距離幾米(mǐ),但是會有一(yī)個(gè)幾(jǐ)十毫米(mǐ)左右的(de)最小探測盲區。由(yóu)於超聲傳感器成本低(dī)、實現方法簡單、技術成熟,是移動機器人中常用的傳感器(qì)。
紅外傳感器
一般的紅外測距都是采用三角測距的(de)原理。紅外發射器按照一定角度發射紅外光束,遇到物體之後,光會反向回來,檢測到反射光之後,通過結構上的幾何(hé)三角關(guān)係,就可以計(jì)算出物體距離D。
當D的距離足夠近的時候,上圖中L值(zhí)會(huì)相當大,如果超過CCD的探測範圍,雖然物體(tǐ)很近,傳感器反而看不到了。當物體距離D很大時,L值就會很(hěn)小,測量精度會變差。因此(cǐ),常見的紅(hóng)外傳感器的測量距離都比較近,小於超聲波,同時遠距離(lí)測量(liàng)也有最小距離的限製。另外,對於透明的(de)或者近似黑(hēi)體的物(wù)體,紅外(wài)傳感器是無法檢測距離(lí)的。但相對於超聲來說,紅外傳感器(qì)具有更高的帶寬。
激光傳(chuán)感器
常見的激光雷達是基於飛行時間的(ToF,time of flight),通過測量(liàng)激光的飛行時間來測距d=ct/2,類似前麵提到的超(chāo)聲測距公式,其中d是(shì)距離,c是光速,t是從發射到接收的時間間隔。
比較簡(jiǎn)單的方案是測量反射光的相移,傳感器以已知的(de)頻率發射一定幅度的調製光,並測量發(fā)射和反向(xiàng)信號(hào)之間的(de)相移,如上圖。
調製信號的波長為lamda=c/f,其中c是光速(sù),f是調製頻率,測量到發射和反射(shè)光束之間的相移差theta之後,距離可由lamda*theta/4pi計(jì)算得(dé)到,如上(shàng)圖。
視覺(jiào)傳感器
常用的計算機視覺方案也有很多種(zhǒng), 比如雙目視覺(jiào),基於TOF的深度相(xiàng)機,基於(yú)結構光的深度相機(jī)等。
基於結構光的深度相機發射出(chū)的光會生成相對隨機但又固定的斑點圖樣,光斑打在物體上,因為(wéi)與攝像(xiàng)頭距離不(bú)同,被(bèi)攝像頭捕捉到的位置(zhì)也不相(xiàng)同。先計算斑點與標定的標準(zhǔn)圖案在不(bú)同位置的偏(piān)移,利用(yòng)攝像頭位置、傳感器大小等參數就可以計算出(chū)物體與攝像頭的距離。
雙目視覺的測距本質上也是三角測距法,由於兩個攝像頭的位置不同,就像人的兩(liǎng)隻(zhī)眼睛一(yī)樣,看到的物體也(yě)不一樣。兩個攝像頭看(kàn)到的同一(yī)個點P,在成像的時候會有不同的像素位置,此時通過(guò)三角測距就可以測出這個點的距離。
在工業4.0時代工業機器人的(de)發展趨勢
美國機器人產業協會(RIA)預測了工業機器人(rén)的六大發展趨勢。
(1)工業物聯網(IIoT) 技術的應用:機器人會在生(shēng)產(chǎn)的最(zuì)前沿應用智能傳感器,采集製(zhì)造商以前無法獲得的數據。
(2)優先考慮工業網絡安全:機器人與內部係統的聯網越來越多,網絡安全的風險不斷增加(jiā)。製造(zào)商必須解決生產工(gōng)藝中的缺陷(xiàn),並在網絡(luò)安全方麵加大投資,確(què)保安全、可靠的生產。
(3)大數據分析成為競爭優勢:機器人將成為工廠(chǎng)車間的主(zhǔ)要信息來(lái)源之一。製造商必須實施係統來組織和分析采集到的所有數據,以(yǐ)便采取有效的行動(dòng),提升企業的競爭優勢。
(4)實施開放式(shì)的自動化架構:隨著機器人自動化應用越來越(yuè)廣泛,對開放式(shì)自動(dòng)化(huà)架構的需求相應(yīng)增加(jiā)。大型(xíng)的行業參與者將與(yǔ)行業機構一起製定標準和開(kāi)放式文檔(dàng),機器人集成(chéng)更加容易,兼容性會變得更好(hǎo)。
(5)虛(xū)擬解(jiě)決方(fāng)案增加:虛擬解決方案會成為工業機器人的一個(gè)主(zhǔ)要部分。
(6)協作機器人將更受歡迎:協作機(jī)器人可以在人類身邊安全地工作(zuò),而且通常比工業機器(qì)人便宜得多。隨(suí)著協作機器人在嚴苛的工業環境中變得更有能力,對投(tóu)資回報率有嚴(yán)格要求的製造(zào)商會(huì)更多地采用協作機器人。
結 語
“工業4.0”強調自動化與信息化相互融合,工業機器人作為自動化製造過程的重要參(cān)與者(zhě),直接影響著工業製造自動化水平。隨著工(gōng)業產(chǎn)品工藝複雜程度和精度的要求不斷提高,機器人的應(yīng)用場所和應(yīng)用需求也越來越(yuè)複雜和苛刻(kè),機器人的計算平台已經從(cóng)傳統的PC平台、嵌入式平(píng)台擴(kuò)展到(dào)智能手機、平板電腦等移動設備,機器人配備的傳感器從簡單的光電開關、觸碰開關發展到觸覺、聲覺、視覺等(děng)高端傳(chuán)感器,機器人伺服係統與控製係統之間的通信方式也由原來的“脈衝+方向”的通信線纜,發展到(dào)通信更高效、通(tōng)信數據量更大的各種現場總線。機器人控製係統正朝著開放化的方向轉變,工業物聯網、大數據分析(xī)以及虛擬化等技術的發展,也使機器(qì)人更好地融入製造業應用。
來源: 未來工(gōng)業互聯網(wǎng)
投稿箱(xiāng):
如果您(nín)有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
如果您(nín)有機床行業、企業相關新聞稿件(jiàn)發表,或進行資訊合作,歡迎聯係本網編輯(jí)部, 郵箱:skjcsc@vip.sina.com
更多(duō)相關信息(xī)

業界視點
| 更多

行業數據
| 更(gèng)多
- 2024年11月 金屬切削機(jī)床產量數據
- 2024年11月 分地區金屬切削機床產量(liàng)數據
- 2024年11月 軸承出口情(qíng)況
- 2024年11月 基本型乘用車(轎車)產量數據(jù)
- 2024年11月 新(xīn)能源汽車產(chǎn)量數據
- 2024年(nián)11月 新能源汽車銷量情況
- 2024年10月 新能(néng)源汽車產量(liàng)數據
- 2024年10月 軸(zhóu)承出(chū)口情況(kuàng)
- 2024年10月(yuè) 分地(dì)區(qū)金屬切削機床產量數據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年8月 新能源汽車產量(liàng)數(shù)據
- 2028年8月 基本型乘用車(轎(jiào)車)產量數據
博(bó)文選萃
| 更多