



測量機(jī)器(qì)人(rén)遠程控製應用設計
2017-3-28 來源:合肥工業大(dà)學 作(zuò)者:王盼 吳兆福 張懷亮
摘要: 利(lì)用(yòng) Leica 測量機器人的 Geo Com 接(jiē)口,使用 C + + 二次開發可實現自動化觀測軟件,為重複(fù)、高頻(pín)次(cì)的變形觀測提供解(jiě)決方案。輔以(yǐ)網絡通信模塊,實現對測量機器人的(de)遠程控製,完成數(shù)據采集任(rèn)務。通過對比分析利用軟件自(zì)動采集的坐標(biāo)和人工直接采集的坐(zuò)標,結果顯示數據(jù)結果穩定可靠。該係統可實現(xiàn)測量(liàng)內外業作業的一體(tǐ)化,大大提高(gāo)傳統測量的效率,在生產實踐中有著重要意義。
關鍵詞: Geo Com; 自(zì)動化觀測; 網絡通信; 數據庫
0 引言
測量機器人可實現數據(jù)獲取和處理(lǐ)的自動化,也可實現測量(liàng)過程的自動化 ( 即無人觀測) 。測量過程控製及其行為的智能化(huà)主要是指(zhǐ)通過程序實現對自動(dòng)化觀測(cè)儀器的智能化控製、管(guǎn)理,模擬(nǐ)人(rén)腦的思(sī)維方式判斷和處理測量過程中遇到的各種問題[1 ~3]。利用測量機器人開發遠程控製程序可以提供高效便捷的自動化測量,大大降低勞動強度。同時可以滿足內、外業一體化、規範化的作業要(yào)求。
本軟件以 Leica TS30 全站儀為基礎,在 Microsoft VisualStudio. NET2010 平(píng)台上利用 C ++ 和 C #語(yǔ)言編寫服務器和用戶端程序,輔以網絡通信(xìn)實現遠程控製。
1.係統開發平台的搭建
遠程控製軟件使用的操作係統是 Windows 7,開發平台是 Microsoft Visual Studio. NET 2010,開發語言為 C ++ 和 C#。遠程控製軟件與測量(liàng)機器人之間的通信(xìn)是通過服(fú)務器端進行的,利(lì)用 Leica 提供的 Geo Com 串行通信接口、C ++ 調用 Class Ge GeoCom. dll 類庫和 Geo Com 封裝函(hán)數來控製儀器進(jìn)行自動(dòng)測(cè)量、轉盤、倒鏡等工作。C#是一種簡單、現代、麵向(xiàng)對象、類型非常安全、派生於 C 和 C ++ 的編程語言,它是專門為與. NET Framework 一起使用而設計的(de),對 . NET 特性的支(zhī)持不僅是完整(zhěng)的,而且提供了比其他語言更合適的語法,而 . NET 具有(yǒu)平台無關性和數據的高效訪問等(děng)優點。所(suǒ)以(yǐ)利用 C#搭建控製中心(xīn)平台(tái)是較好的選擇,能夠滿足建立(lì)友好(hǎo)用戶界麵和方便操作數據庫的要(yào)求(qiú)。
2.係統設計
2. 1 係統總體設計
本係統使用(yòng)的是 TS30 全自動全站儀(yí),該儀器測角精度為 0. 5″,測距精度為 1mm + 1ppm × D ( D為所測距(jù)離) ,轉速為 180° /s,正倒鏡的轉換隻需2. 9s,非常有利(lì)於進行自動化觀測測量[4]。機器人(rén)遠(yuǎn)程控製係(xì)統(tǒng)由三部分組成: 測量機器人功能軟(ruǎn)件(jiàn)、無(wú)線通(tōng)訊模塊程序和控製中心軟件。本係統設(shè)計的基本結構(gòu)如圖 1 所示。
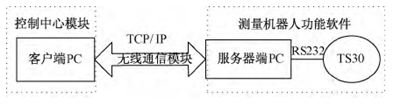
圖 1 測量機器人遠程監控係統架構
(1) 測量機(jī)器人功能軟件
這一部分主要是服務器端程序,包括遵照國家三角測(cè)量(liàng)作業規(guī)範編寫的 “多測回自(zì)動觀測” 程序,具有自動(dòng)照準目標、自動測角、自動測距及超限或目(mù)標丟失等異常情況的自動處理(lǐ)功(gōng)能[5,6]。此外(wài),可以根據不同的工程任務進行設置,也可以對軟件程序進行修改,得(dé)到滿足不同工況(kuàng)的軟件,從而使(shǐ)得測量效率大大(dà)提高。
(2) 無線通訊模塊
主(zhǔ)要負責建立通訊鏈路,用(yòng)來轉發指令或數據(jù)。在客戶端和服務器端 PC 程(chéng)序都有編寫接收和發送的通訊模塊。服務器端收到控製中心指令(lìng)後,解析出指令內容,然後轉發給測量機器人; 客戶端收到測量機器人數據後,按照約(yuē)定的數據格式保存到數據庫。
(3) 控製中(zhōng)心模(mó)塊
這一(yī)部分程序是在客戶端程序進行編寫,主要實現發(fā)送開關機、觀測等控製(zhì)指令、接收觀測狀態以及(jí)傳輸測量數據。該控製中心軟件還包含有 SQLServer 數據(jù)庫(kù)管理模塊和數據後處理平差模塊(kuài)。通過Internet 接收到的無線數據包經過 SQL Server 數據庫管理模塊直接自動輸入到 SQL Server 大型數據庫中。
2. 2 測量機器人功能軟件
Geo Com 按照功能可分為(wéi) 12 個子係統功能函數,本係統主(zhǔ)要利用其(qí) COM、AUT 和 TMC 三個主要模(mó)塊進行(háng)功能軟件的開發[7,8]。調用 Geo Com 一般步(bù)驟為: 初始化→打開通訊端口→將望遠(yuǎn)鏡照準指定方向→精密照(zhào)準目標→執行測距動作→獲取角度和距離的測(cè)量數(shù)據→清空測距結果(guǒ)→關閉通訊端口→退出 Geo COM。
2. 3 無線通訊(xùn)模塊
由於 TS30 全站儀自身提供的 RS232 電纜(lǎn)線(xiàn)可(kě)用距離非常短 ( 1. 5m) ,無法滿足操作人員遠程控製和數據遠程傳輸的要求[9,10]。采用 Socket 類來(lái)實現 C /S 模(mó)式下網絡程序的通信可以很好地解決遠程控製問題。根(gēn)據連接啟動的方式以(yǐ)及本地套接字要連接的目標(biāo),套接字之間的連接過程可以分為三個步驟:
(1) 服務器監聽: 指服務器端套接字並不定位(wèi)具體(tǐ)的客戶(hù)端套接字,而是處(chù)於(yú)等待連接的狀態(tài),實時監控(kòng)網絡狀態。
(2) 客戶(hù)端請求: 指由客戶端的套接字提出連接請求,要連接(jiē)的目標是服務器端的套接字(zì)。為此,客(kè)戶端的套接字必須首先描述它要連接的服務器的套接字,指出服(fú)務器端套接字(zì)的地址和端口號,然後向服(fú)務器端套接字提出連接(jiē)請求。
(3) 連接確(què)認: 指當服務器端套接字監聽到或者接收到客戶端套接字的連接請求時,響應客戶端套接字的請求,建立(lì)一個新的線程(chéng),把服務(wù)器端套(tào)接(jiē)字的描述發給客戶端,一旦客戶端確認了此描述,就建立(lì)好連接。而服務器端套接(jiē)字繼續處於監聽狀態,繼續接收其他客戶端套接字(zì)的連接請求。
2. 4 控製中心模塊
2. 4. 1 數據庫(kù)的設計
開發本係統軟件總體任務(wù)之一就(jiù)是建立監測數據的數據庫,本次建立的數據庫分為數據庫管理和數據庫查詢兩個模塊。在(zài)數據庫管理模塊中(zhōng)建立用戶和測量數據的管理,在數據查詢模塊中設(shè)計點號查詢和日期查詢兩種查詢方式。本數據係統的功能如圖 2 所示。
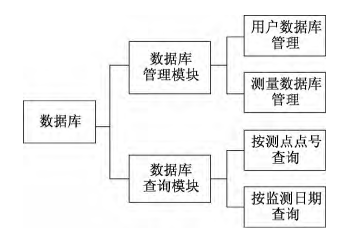
圖 2 數據係統功能示意圖(tú)
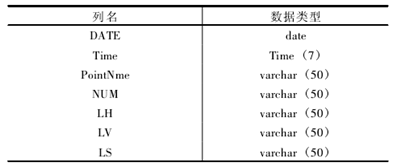
為了保證高質(zhì)量、高效、便捷地完成測量任(rèn)務,且測量成果滿足國家測量(liàng)規範,本係統數(shù)據庫的測量數據庫管理模(mó)塊設計有盤左測量數據存儲表dbo. LANGLE 和盤(pán)右測量數據存儲表 dbo. RANGLE。其中表 RANGLE 結構如表 1 所示(shì)。從表 1 中可以看出,該表的設計有利於測量數(shù)據的實時存儲(chǔ)。
表 1 RANGLE 表結構
2. 4. 2 C#開發(fā)模擬測量狀態動畫
為了使用(yòng)戶更加方便地操控(kòng)儀器,本軟件設(shè)計四個快(kuài)捷鍵(jiàn) “W”、“A”、 “S”、 “D”來控製儀器向上、左(zuǒ)、下(xià)、右勻速轉動,進行目標照準範圍的選取。 當鍵盤上相應的字符被按下,則觸發Keydown 事件,客戶端向服務器發出打開激光和全站儀轉動指令。當按鍵被鬆開,則觸發 Keyup 事件,發出關(guān)閉激光和全站(zhàn)儀停止轉動指令(lìng)。圖 3 為方向控製鍵代碼。
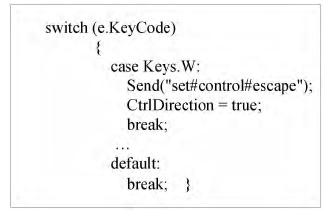
圖 3 方向控製鍵部分代(dài)碼
模擬測量狀態的動畫界麵是利用 C#雙緩存技術開發的。通過學習測量(liàng)將所有(yǒu)的監(jiān)測點按實際的方位模擬顯示在軟件上。在多(duō)測(cè)回測角狀態,軟件會根據現場照準點的情況,模擬(nǐ)測量動畫。在鼠標點擊相應(yīng)圖標時,程序會(huì)計算出(chū)焦點與圖標的距離關係,判斷選中的目標點號並觸發測(cè)量事件,即實(shí)現 “任意測量”的功(gōng)能。 “任意(yì)測量”功能的(de)關鍵代(dài)碼見圖 ,功能(néng)測量界麵見圖 5,視圖模擬測量(liàng)如圖 6 所示(shì)。
圖 4 任意測(cè)量(liàng)功(gōng)能代碼

圖 5 功能測量界麵
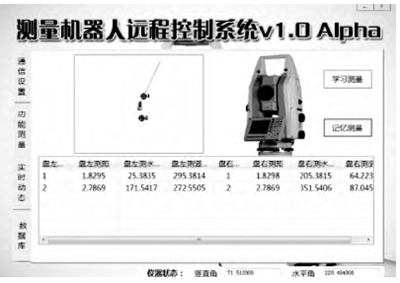
圖 6 視圖模擬測量
3.係統應用
在完成測量機器人遠(yuǎn)程控製係統後,為了驗證該係統的實用性和穩定(dìng)性,對軟件進行了(le)實際應用。在合肥市地鐵 2 號線某(mǒu)基坑變(biàn)形監測的現場辦公室(shì)安(ān)裝上客戶(hù)端軟件,並通過 WIFI 連接上(shàng)互聯網,在 WIFI 所能覆蓋的現場強製(zhì)對中測(cè)墩 A 上安置 TS30 全站儀,並與服務器端 PC 連接,服(fú)務器端PC 也連接互(hù)聯網。在離測站 A50-150m 距離範(fàn)圍內布置(zhì) 6 個 Leica 圓棱(léng)鏡作為監(jiān)測目標。首次連接時,在客(kè)戶端先設置服務器的 IP 和端口號,連接成功後,控製儀器轉動,自由設站後進行學習測(cè)量。之(zhī)後進入多測(cè)回測角設置,設置觀測測回數為 2,觀測(cè)周期為 8,點擊記憶測量(liàng)進行多測回角(jiǎo)觀測。從觀測(cè)結果(guǒ)來看,Leica TS30 自動目標識別的情況良好,測量精度較高。
將數據庫的觀測數據導出後,利用平差軟件對(duì)數據進行平差解算(suàn),並以第一周期數據(jù)為基礎(chǔ)進行變形分析,得出各個點的變形情況(kuàng),其中監測點 1的後 7 個周期人工觀測與用軟件進行自動觀(guān)測的變形量對比如圖 7 所示(shì)。由圖 7 可以看出,人工觀測和自動觀測有一(yī)定(dìng)的(de)誤差,但變形量都為正數,說明(míng)反映的變形趨勢一致,且這種(zhǒng)誤(wù)差是由觀測(cè)的隨機誤(wù)差造成的,誤差最大處僅(jǐn)為 0. 2mm,說明變化量也相當,自動觀(guān)測可以達到(dào)替代人工觀測的精度(dù)要求。
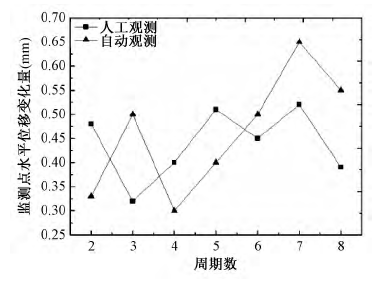
圖 7 人工觀測變化量與自動觀測變化量對比(bǐ)圖
4.結束語
本軟件通過網絡通信實現了遠程控製測量,體現出了測量內外業的一體化和數據獲取及處理的自動化。利用遠程控(kòng)製係(xì)統進行變形監(jiān)測可大大降低勞動強度,提高作業效率。特別適合小型基坑的長(zhǎng)期監測(cè)。在此基礎上,可研究用安卓係統的手機等微型終端連接儀器作為服務器,使得測量更加智能化。
投稿箱(xiāng):
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相(xiàng)關信息
州金馬")
業界視點
| 更多

行業數據
| 更多
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削(xuē)機床產量數據
- 2024年11月 軸承出口情況
- 2024年11月 基本(běn)型乘用車(chē)(轎車(chē))產量數據
- 2024年11月 新能源汽車產(chǎn)量(liàng)數據
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月(yuè) 軸承出口情況
- 2024年(nián)10月(yuè) 分地區金屬切削機床產量數(shù)據
- 2024年10月 金屬切削機床產量數據
- 2024年9月 新能源(yuán)汽(qì)車銷量情況
- 2024年8月 新能源汽車產量數據
- 2028年8月(yuè) 基本型乘用車(轎車(chē))產量數(shù)據
博文(wén)選萃
| 更多