儀")



RLS磁編碼器增強兩輪自(zì)平衡機器人小車的穩定性控製
2021-12-30 來源:雷尼紹 作(zuò)者:-
在設計兩輪自平衡機器人小車時,精確、快速地(dì)測量角度旋轉(zhuǎn)是一(yī)項關鍵要求。除此之外,零部件的重量(liàng)和尺寸(cùn)最小化也同樣重要。東京電機大(dà)學 (Tokyo Denki University, TDU) 工(gōng)學部的學生,利(lì)用雷尼紹(shào)關聯公司RLS的RM08磁旋轉編碼器解決了這個問題。
背景(jǐng)
東(dōng)京電機大學是一所致力於(yú)科學和技術(shù)教育的高校,於1907年由兩位年輕的工程師廣(guǎng)田精一(yī)和扇本真吉創立,其辦學宗旨是推(tuī)動工程學科教育,為國家經濟發展(zhǎn)奠定基石。
石川(chuān)淳先生在TDU的機器人與機電一體化學(xué)科任教,並且在機器人控製係統開發(fā)等多個技術領域(yù)開(kāi)展先(xiān)驅研究。石川淳先生向工學部的學生們提出一項考驗(yàn):製作一輛兩輪自平衡機器人小車。在這個項目中,學生們選擇了雷尼紹關聯公司RLS的RM08磁(cí)旋轉位置反(fǎn)饋編碼器。

挑戰
石川(chuān)淳先生對學生們提出的考驗是:如何解決經典的控製理論難題 — 倒立(lì)擺。比如著名的Segway(賽格威)電動平衡車,它的技術基礎是將倒立擺的質心設計在支點上方。
倒立擺與(yǔ)懸(xuán)掛擺不(bú)同,懸掛擺會在移位後(hòu)自然恢複到穩定的平衡位置,而倒立擺具有(yǒu)內(nèi)在的不穩定(dìng)性。想(xiǎng)象一下,將台球杆或掃帚柄直立倒放在手(shǒu)掌上,如果不持續調整手的位置,它(tā)就會翻倒。
較短的倒立擺比較長的倒立擺加速遠離(lí)垂直位置的速度更快,因此需要更頻(pín)繁地調整位置,而(ér)且更難控製。比如,在手掌上保(bǎo)持(chí)鋼筆(bǐ)直(zhí)立比保持台球杆直立更難。
Segway所采用的一種解決方案是,將支點放在輪式平台上(shàng)。這種車輛從IMU(慣性測量單元(yuán))獲取(qǔ)慣性輸入。IMU包含兩個傳感器:加速度計和陀(tuó)螺儀。
在這(zhè)種情況下,垂直軸和水平軸上的加速度計均用於確定重力引起的角度(dù)加速度。通(tōng)過不斷(duàn)監(jiān)測擺錘的傾斜角和角速度,可使用PD(比例微(wēi)分)控製係統來驅動車輪向前或向後滾動,以(yǐ)此保持平(píng)衡。
學生們決定在他們自己設計的(de)控製係統中采(cǎi)用一種類似的方法,因此他們需要設(shè)計並集(jí)成一個(gè)高效的三件式解決方案,包括(kuò)傾(qīng)斜角度傳感、控製邏輯和電機驅動電路。對於為此控製應用設計的PCB(印刷電路板),尺寸小且重量輕是集成到車把內的(de)決定性要素。他們對PCB的結構進行了優化,以確(què)保在最小的封裝尺寸內集成所有必(bì)需的功能。
解決方案
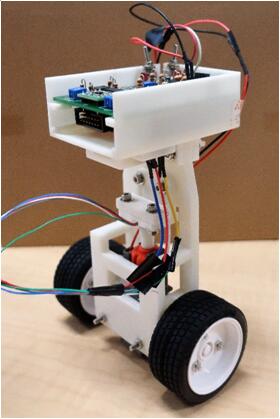
將PCB控製板安(ān)裝在車(chē)把(bǎ)內,位於擺錘的頂部,承載所有必需的電(diàn)子電路,包括固態陀螺儀、微控製器、直流電機驅動器(qì)和電源管理組件。
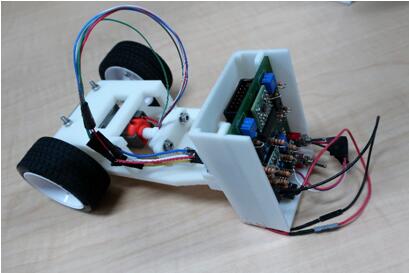
輪式平台的底部有兩條軸:連接車輪的水平(píng)軸和由緊湊型直流電機驅動的垂直軸。兩條軸的交叉處裝有一個簡單(dān)的錐齒(chǐ)輪傳動裝置,電機通過此傳動裝置可朝任意方向驅(qū)動車輪。
係統必須將方向保持在近乎垂直的極小角度範(fàn)圍內,才能進行有效控製。如果小車(chē)朝(cháo)任一方向傾(qīng)斜超過30 °,則可能會失去穩定性。為保持平衡(héng),必須以經過精(jīng)密計(jì)算的加速度和速度連續驅動車輪。
為達到預期的運動控製性能,學生們需要一個高分辨率位置編碼器(qì)來監(jiān)控和調節電機輸出。而且,這個(gè)編碼器還必須小巧輕便,能夠容納在小(xiǎo)車纖薄的垂直結構中。
經過深思熟慮,他們最終選擇了雷尼紹關聯公司RLS的RM08磁旋轉(zhuǎn)編碼器(qì)。這款非接觸式、無摩擦磁旋轉編(biān)碼器僅重2 g(包括電(diàn)纜),具有鋁製傳感器外(wài)罩(zhào),直徑(jìng)為8 mm,厚度僅為3 mm。
學生們設計了一個細窄的尼龍襯圈,作為電機軸與RM08編碼器的磁勵體之(zhī)間的機械連接,而這個設計隻增加了不到0.5 g的重量。RM08編碼器產生12位分辨率輸出(每轉4,096步),可用於(yú)運行速度高達30,000 rpm的應用(yòng),精度(dù)達到±0.3 °。
結果
東京(jīng)電機大學的學生們(men)設(shè)計出一個運動控製方案,使用(yòng)RM08高(gāo)速磁旋轉編碼器以12位分辨率測量角度旋轉,令兩輪機器人小(xiǎo)車保持自(zì)平衡和直立(lì)。
RM08編碼器的防護(hù)等級達到IP68,專用於集成到各(gè)種大批量OEM應用中,性能非(fēi)常可靠。
還有一點也很重要,磁(cí)旋轉編碼(mǎ)器還解決了這輛小車苛刻的物理設計限製(zhì)。它(tā)的外形極為緊湊且輕巧,幫助學生們同時克服了空(kōng)間和負載限製。
這個項目的成功為學生們樹立(lì)了信心,激(jī)勵他們繼續探索更(gèng)多的高階機器人項目。
詳情請(qǐng)訪問(wèn)www.renishaw.com.cn/denki
詳情請訪問www.renishaw.com.cn/encoders
投稿箱:
如(rú)果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
如(rú)果您有機床行業、企業相關新聞稿件發表(biǎo),或進行資訊合作,歡迎聯係本網編輯部(bù), 郵箱:skjcsc@vip.sina.com
更多相關信息(xī)

業界視點
| 更多(duō)

行業數(shù)據
| 更多(duō)
- 2024年11月 金屬切削機床產量數據
- 2024年11月 分地區金屬切削機床產量數據
- 2024年11月 軸承(chéng)出口情況
- 2024年11月 基本型乘用(yòng)車(轎車)產(chǎn)量數據
- 2024年11月(yuè) 新能源汽車產量數據
- 2024年11月 新能源(yuán)汽車銷(xiāo)量(liàng)情況
- 2024年10月 新能源汽車產量(liàng)數據
- 2024年10月 軸承出口情況
- 2024年10月 分(fèn)地區金(jīn)屬切削(xuē)機床產量數(shù)據
- 2024年10月 金(jīn)屬(shǔ)切削機床產量數據
- 2024年9月 新能源汽車銷量情況
- 2024年(nián)8月 新能源汽車產量數據
- 2028年8月 基本型乘(chéng)用車(轎車)產量數據
博文選萃
| 更多