描儀")



目前(qián)國外汽車公司的白車身焊(hàn)裝線一般都采用自動化(huà)和柔性化程度較高的機器人(rén)焊裝線(xiàn),主要有電阻點焊接(jiē)和激光焊接兩種焊接方式。激光焊接在(zài)焊裝生產線上應用的一個(gè)非常(cháng)大的局限(xiàn)性是對車身零件的定位精度(dù)有較高的要求,如果偏差(chà)過大(dà)直接影響到(dào)焊(hàn)接質量,甚至根本無法焊接。而(ér)這個難題在國內汽車廠大多難以解決,因為車身是由上百個零件組(zǔ)裝而成,最終車(chē)身的(de)誤(wù)差也被多(duō)次放大,難以滿足激光焊(hàn)的精度要求。
為解決白車身車頂機器人在實施(shī)激光焊接(jiē)時焊縫(féng)精度等(děng)問題(tí),華工法利萊將三維視覺係統運用於汽(qì)車自主品牌,並成功引入到車頂激光焊接生產線上,取得了良好效果。三維視覺係統在白車(chē)身車頂激光焊的應用在國(guó)內(nèi)同行業尚屬首(shǒu)次,為以(yǐ)後此項技術的推廣積累了寶貴的經驗。
三維激光視覺係統是以(yǐ)計(jì)算機、信息處(chù)理、三維圖像處理、激光(guāng)為基礎的高新技術。該係統是降低工具(jù)成本和提高生產效(xiào)率的一(yī)種良好方法(fǎ),采(cǎi)用視覺技術以後,可在焊接之(zhī)前對焊縫進行預處理,通(tōng)過機器人軌跡調整來彌補車身精度不(bú)足,大幅度提升生產效(xiào)率。
在此,本文結合華工法(fǎ)利(lì)萊的三維激光視覺係統在江淮M111項目的白車身頂蓋激(jī)光焊生(shēng)產線上(shàng)的應用,重點介紹三維激(jī)光視覺係統及其調試步驟。
一、係統組成
三(sān)維視覺係統主要由以下幾大部(bù)分組成,它通過ETHERNET IP協議與機器人控(kòng)製器進行通訊,連接方(fāng)式如下圖所示。
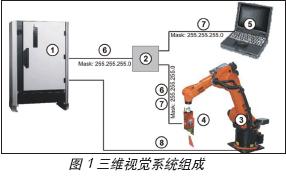
部件描述:
①機器人控製櫃,實現(xiàn)機器人控製及與傳感器通訊和控製;
②三維視覺係統控製器,三維視覺係統的控製及與外部設備的通(tōng)訊;
③機器人本體,實現機器人本體運行及傳(chuán)感器的安(ān)裝固定;
④三維視覺傳感器,焊縫拍照(zhào)及圖像處理;
⑤PC,對傳感器的(de)參數設置及狀態監控;
⑥電源供電電纜,傳感器供電;
⑦以太網電纜,與三維(wéi)視覺係統進行通訊;
⑧機器人標準連接電纜,機(jī)器人控製器與(yǔ)本體連(lián)接。
二、工(gōng)作原理
三維視覺係統的工作原理是在(zài)焊接之前機器人通過控製安裝在第六軸上的激光三維視覺係統對焊縫進行激光拍照,三維視覺係統通過圖像處理技術進行處理,識別出(chū)焊縫位(wèi)置的幾何坐標,並通過總線將該坐標值傳輸給機器人控製器,機器人(rén)控(kòng)製器將該(gāi)坐標與標準坐標進行對比計(jì)算出位置(zhì)偏差,然後根據該(gāi)誤差(chà)對焊接(jiē)軌跡自動校正。

三、實現方法
第一步,識別(bié)焊縫。傳感器與機器人連接並正常通訊後,首先要實現傳感器對焊縫的識別,即根據焊縫形式,對傳感器參數進行設置,然後開激光進行測試,傳感器(qì)會進行激光拍攝(shè),並經過圖像處理,然後與預設(shè)焊縫形式(shì)進行對(duì)比,通過參數和機器人位置調整直到(dào)傳感器能夠得到穩定焊縫。
第二步,傳(chuán)感器標定。傳(chuán)感器(qì)正確識別焊縫還不能(néng)正常工作,因為傳感器(qì)是(shì)安裝在機器(qì)人上的,它與機器人還沒有什麽關係,而傳感器標(biāo)定就是確定傳感器與機器人的(de)相對(duì)關係,使傳感器識別出的焊縫位置能夠被機器(qì)人利用(yòng)。
第三步,焊縫掃(sǎo)描與(yǔ)矯正。焊接時要實現焊縫的矯正,首(shǒu)先要確(què)定(dìng)一(yī)個標準的車(chē)身,即將機器人移動到焊縫上的合適的(de)掃描位置,控製傳感器進行(háng)焊縫掃描,將焊縫位置作為標準的位置保存。在(zài)焊接(jiē)之前將機器人移動到原來相同的掃描位置進行掃描,將識別的焊縫位置與之前的標準焊縫位置進行比較得出偏差,然後對(duì)軌跡進行矯正,它(tā)可實現對軌跡(jì)上各個點在X,Y,Z方向上進行矯正。
結束語
華工法利萊將三維視覺係統成功應用於國內白車(chē)身車頂激光焊(hàn)項目,在國內汽車自主品牌中尚屬首次,而江淮M111項目(mù)的此次(cì)應用已成功實現整車(chē)量產,根據現場一年多的應用情況來(lái)看,三維視覺係(xì)統的應(yīng)用大大(dà)降低了激光焊對(duì)車身精度方麵的要求(qiú),實現批量自動化生產,運行穩定、可靠,這為激光焊在汽車行業的推廣應用提供了一套(tào)很好的解決方案。
三維激光視覺係(xì)統的應用有利於降低項(xiàng)目及營運成本(běn),提高生產效率、產品(pǐn)質量和生產柔性,培養(yǎng)和(hé)鍛煉相關工程人員,同(tóng)時又有力地促進了白車身(shēn)生產技術的進步,對於提高中國(guó)汽車的(de)競爭力,對建立創新型國家和提升(shēng)我國綜合國(guó)力都具有積極的作用。
如(rú)果您有(yǒu)機床行業、企業相關(guān)新聞稿件發(fā)表,或(huò)進(jìn)行資訊合作,歡迎聯(lián)係本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com

牌調查")
- 2024年11月 金屬切削機床產量(liàng)數據
- 2024年(nián)11月 分地區金屬切削機床產量數據
- 2024年11月 軸(zhóu)承出口情況
- 2024年11月 基本(běn)型乘(chéng)用車(轎車)產量數據
- 2024年11月 新能源汽(qì)車產量數據
- 2024年(nián)11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產量數(shù)據(jù)
- 2024年10月 軸承出口(kǒu)情況
- 2024年10月 分地區金屬切削機床產(chǎn)量數據
- 2024年10月 金(jīn)屬切削機床產量數據
- 2024年9月 新能源汽車銷量(liàng)情況
- 2024年8月 新能源汽車產量數據
- 2028年8月 基本型乘用車(轎車)產量數據