


基於五軸機床空間(jiān)運動分析的後處理研究
2013-12-22 來源:數控機床市場網 作者:陳良(liáng)驥劉元朋
摘要!針對五軸加工時從刀位文件(jiàn)到數控程序的後處理問題"以雙轉台類型的五軸機床為例(lì)建立了(le)由參考坐(zuò)標係到工件坐標係之間的中間坐標(biāo)係"基於對(duì)各坐標係運動情況的分析最終(zhōng)得到了由參考坐標(biāo)係到工件坐標係的坐標(biāo)變換矩陣"從而將五軸後處理過程簡化為求解一個關於機床控製坐標的(de)線性方程組#,實際計算結果表明所提出方(fāng)法是正確可行的而且適用於其他任(rèn)何類型的五軸機床.
關鍵詞:數控五軸加工坐標變換後處理
五軸聯動的刀(dāo)位文件中的刀位數據既包含刀心點坐標(biāo)也包含刀軸方位的單位矢量"這種刀位(wèi)文件通常是以工(gōng)件固定&刀具運動的方式得到的% 而實(shí)際加工中"五軸機床結(jié)構類型有(yǒu)很多種"不同(tóng)類(lèi)型(xíng)機床所需要的數控代碼也不同.因此"五軸聯動刀位文件隻是(shì)一種中性文件"它(tā)能(néng)為各種類型的機床提供同(tóng)一的刀具運動軌跡的數據% 要完成曲麵的五軸加工還(hái)必須對刀位文件進行後處理成(chéng)適合於各種類型五(wǔ)軸機床的(de)數控代碼.為解決從刀位到數控代碼的轉(zhuǎn)換問題"現行的後處理方法一(yī)般根據圖形的方法進行分析 但具體實現這些方法時卻往往感到不容易直觀(guān)理解而且極易出錯.區別於現行的後處理方法本文將對雙轉(zhuǎn)台型五軸數控機床進行運動學分析和建模並進行(háng)後(hòu)處理的研究.
1、雙轉台型五軸機床及其坐標係(xì)
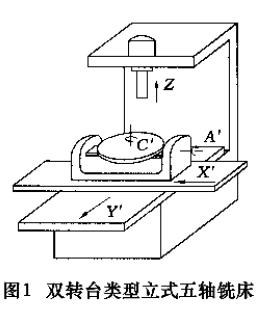
圖1為一種回轉坐標均(jun1)由工作台實現的立式五軸銑床"如(rú)MIKRON公司的ucp係列五軸機床.其中:機床坐標係X Y 軸由工作台實(shí)現Z軸平(píng)動由主軸帶動刀(dāo)具上下移動實現.擺動台(Tilting Table TT) 可以(yǐ)繞X軸擺動" 是為A軸( 一般進行上(shàng)下(xià)90度範圍內(nèi)的擺動) TT中(zhōng)間有一個回轉台(Rotating Table ,RT) " 在(zài)圖(tú)示位置上繞Z軸360度自由回轉"定義為C軸. 通過A軸與C軸的組合(hé)" 固定在RE上的工(gōng)件除了底麵之外"其餘的W 個麵都可以由立式主軸進行加工. 如(A C 軸與X Y Z三個直線軸實現聯動" 就可加工出複雜的空間曲麵(miàn). Z Y Z A C 軸的運動坐標分別為X' ( 加' , 表示(shì)運動由工作台實現) Y Z 不加' 表示(shì)運動由主軸實現A C 如圖1 所示(shì).
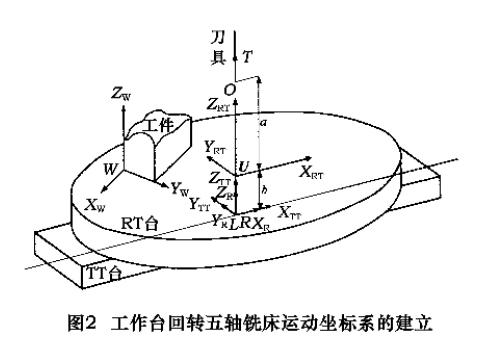
如圖2 所示"在加(jiā)工初始時C軸軸線與(yǔ)刀具軸線( 刀軸單位矢量為T 共線且與A軸軸線 RT台上表麵分別相交於L和U( 距離為b= L-U ,Z軸方向(xiàng)可測(cè)出(chū)刀(dāo)心點O與U的距離 a=O-U.分(fèn)別建立如下各坐標係:機床坐標(biāo)係在出廠(chǎng)時已確定;參考坐標係XR - YR - ZR,RCS 原點(diǎn)R與L點(diǎn)重(chóng)合,各軸方向與機床(chuáng)坐標係一致(RCS係在加工過程中固定) ;擺動台坐標係( XTT -YTT-ZTT TTCS) 與RCS係重合(TTCS係不隨TT擺動,隻做X Y 方向的平動) ;轉動台坐標(biāo)係(xì)( XRT-YRT-ZRT RTCS )建在U處各軸方(fāng)向與RCS係一致(RTCS係不隨RT轉動但隨TT台一起擺動)
工件裝夾在RT上,定義工件的坐標係(XW-YW-ZW,WCS) 隨RT運動而運動( 本文假定工件裝夾完畢WCS係與RTCS係重(chóng)合).
2、 雙轉台型五軸機床運動分析
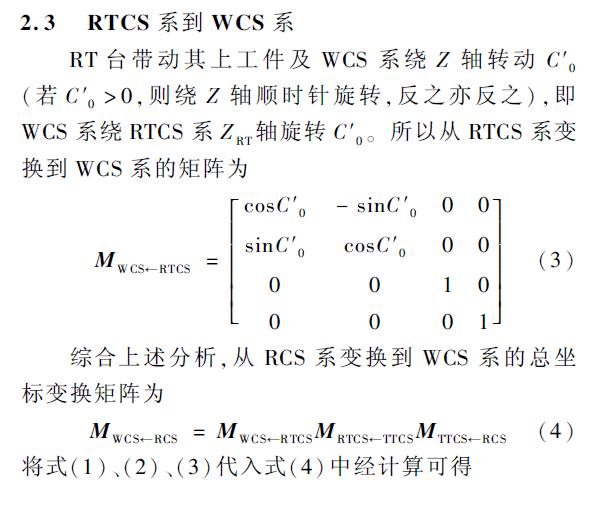
機床空間運動分析的目的是根據前麵建(jiàn)立的坐(zuò)標係及其運動方式"計算出在加工過程中(zhōng)某時刻( 假定此時機床各軸的坐標為 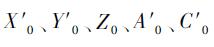 各坐標係之間的坐標變換(huàn)矩陣。
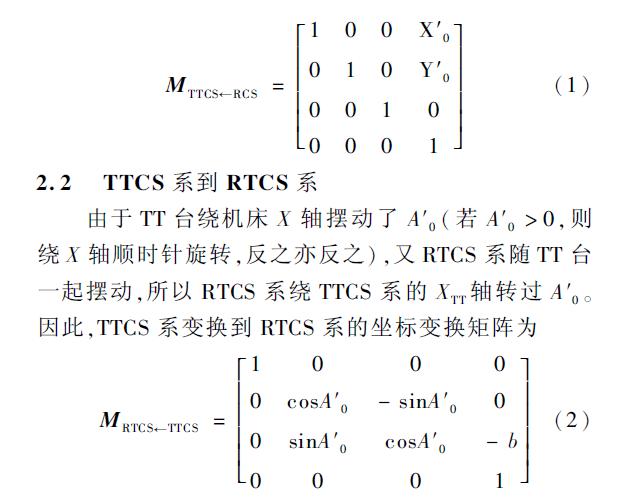
各坐標係之間的坐標變換(huàn)矩陣。



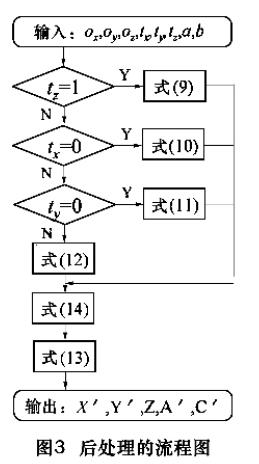
至此, 整個後處理過程可以歸納為如(rú)圖(tú)3所示(shì)算法流程.
4、實例計(jì)算與結果驗(yàn)證分析(xī)
圖2 中假定a=450mm如圖4所示"假定在工件坐標係下有兩個相(xiàng)鄰刀位’刀位:1(01,T1)和刀位2(02,T2) "現應用前麵介紹(shào)的後(hòu)處理算法分別對兩個刀位計算其對應的加工代
碼.
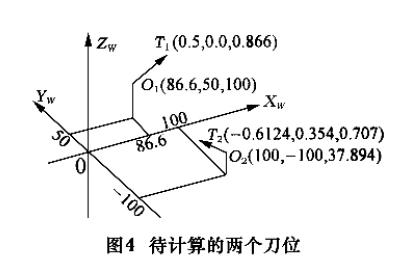
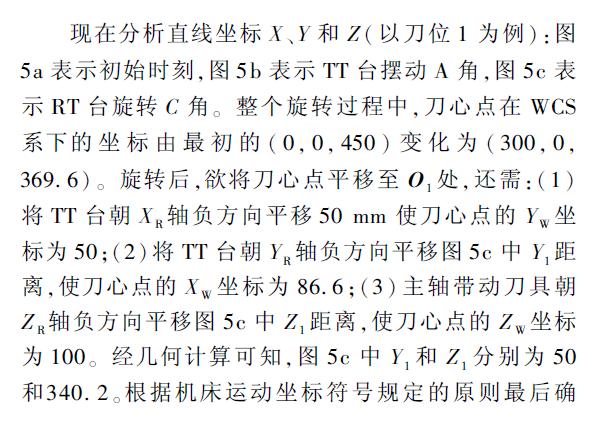
定出三個平移坐標分別為 X1=50 Y1=50 Z1=-340.2與計算(suàn)出來的結果完全一致.
5 結語
本文以旋轉運動均由工作台實現的雙轉台類型五軸機床為例進行了後處理研究, 該方(fāng)法同樣(yàng)可以擴展至其他類型的機床(chuáng)"進行後處理(lǐ)時"可以先針對具(jù)體機床結構建立(lì)起相應的運動坐標(biāo)係(xì)"然後給定機床各聯動軸的運動坐標分析其各坐標係之間的坐標變化關係"最終建立起機床運動模型, 基於該模型可以給出機床運(yùn)動坐標和刀位文件中刀(dāo)位(wèi)的關係"先(xiān)討論出轉動坐標"然後可(kě)通過解一個線性方(fāng)程組來求解三個平動坐標, 通過實際計算及結果分析"能(néng)充分驗證本文方法的正(zhèng)確性和可行性.(文自:鄭州航空工業管理學院機(jī)電工程係 )
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網(wǎng)編(biān)輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網(wǎng)編(biān)輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業界視點
| 更多

行業(yè)數據
| 更多
- 2024年11月 金屬切(qiē)削機床產量數據
- 2024年11月(yuè) 分地區金屬切削機床產量數據(jù)
- 2024年11月(yuè) 軸承出口情況
- 2024年11月 基本(běn)型乘用車(轎(jiào)車)產量數據(jù)
- 2024年11月 新能源汽(qì)車產量數據
- 2024年11月 新(xīn)能源(yuán)汽車銷量情況
- 2024年10月 新能源汽車產量數據
- 2024年10月(yuè) 軸承出口情況
- 2024年10月 分地區金屬切削(xuē)機床產量數據
- 2024年10月(yuè) 金屬切削機床(chuáng)產量數據
- 2024年9月 新能源汽(qì)車銷量情況
- 2024年8月 新能源汽車(chē)產量數據
- 2028年8月 基本(běn)型乘用車(轎車)產量數據
博文選萃
| 更多